Stereo Reconstruction
Point-cloud reconstruction from disparity in the context of stereo cameras refers to the process of creating a 3D representation of a scene using information obtained from two or more images captured by stereo cameras.. 
Point-cloud reconstruction from disparity in the context of stereo cameras refers to the process of creating a 3D representation of a scene using information obtained from two or more images captured by stereo cameras..
SAD-SLAM: Sign-Agnostic Dynamic Simultaneous Localization and Mapping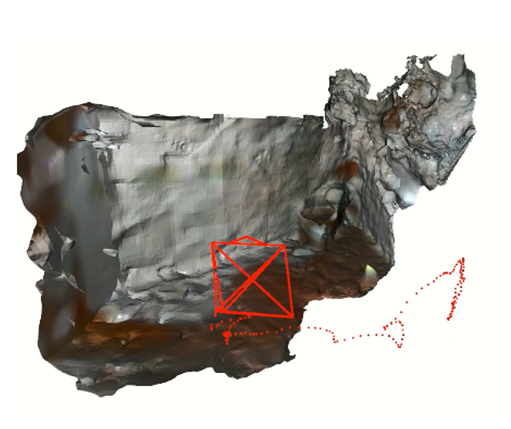
Feature descriptors chosen as SIFT ROOT demonstrate a better result of visual odometry. 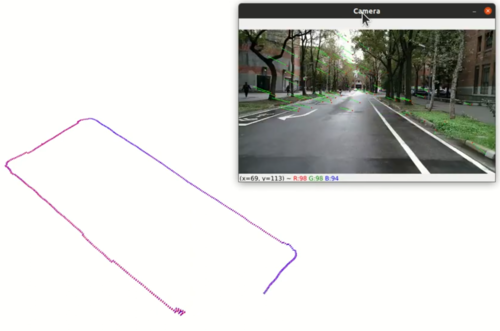
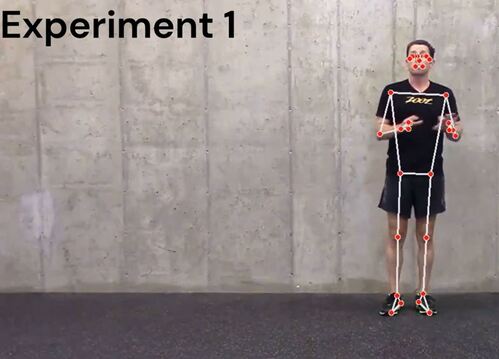
Use MediaPipe to detect pose landmarks.