Research Contributions
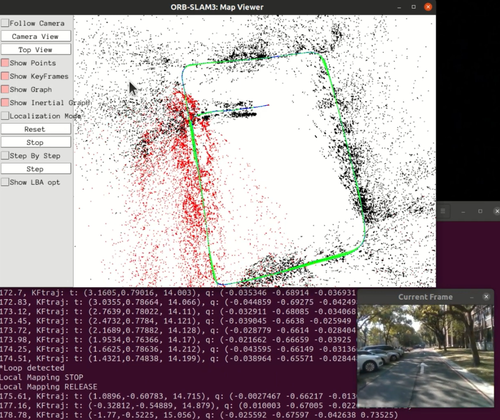
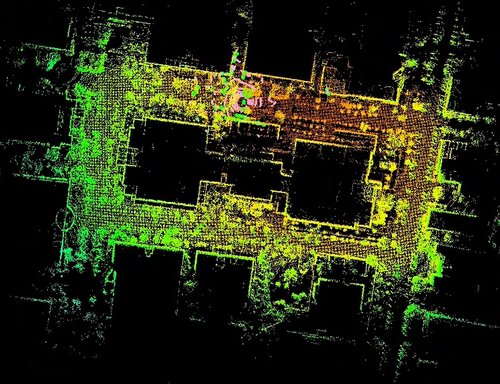
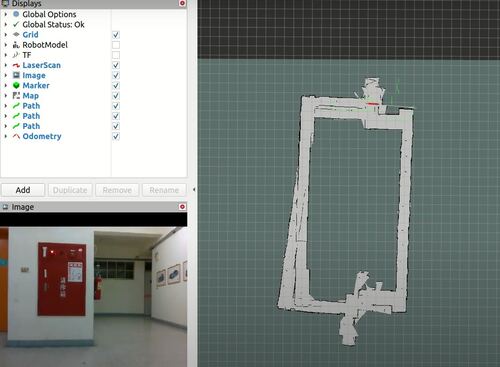
In the summer of 2023, I successfully defended my thesis titled Development of 3D Reconstruction and Navigation for Mobile Robots. As the title suggests, my research integrates two key components: 3D reconstruction and autonomous mobile robots (AMRs). This work not only forms the basis of my master’s thesis, which was published at National Taiwan University, but also encompasses three distinct paper drafts, each exploring different aspects of my research.
After reading the summary of the thesis and my contributions, you can visualize my experiments through the following videos.