Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
This project introduces a decoupling method called Disturbance Response Decoupling (DRD) to reduce the vibration of an optical table. The DRD is extended to Output DRD and Input-Output DRD to enhance the optical table’s performance under varied simulation conditions. We first test a quarter table and then extend our analysis to a larger scale, namely the full table. MATLAB simulations demonstrate the decoupling effects of various control strategies when different disturbances and outputs are considered. All types of DRD significantly reduce the vibration of the optical tables.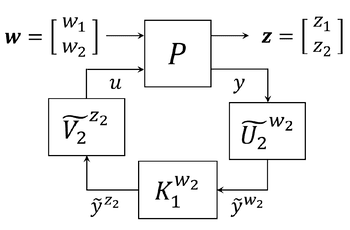
The Multi-Input Multi-Output (MIMO) system of a quadcopter is more complex than a simple Single-Input Single-Output (SISO) system, necessitating a scientific analysis. After tuning a stable PID controller, we found that the ARX model best fits the experimental data. Our system identification approach enables the design of a stabilizing controller that improves the quadcopter’s performance.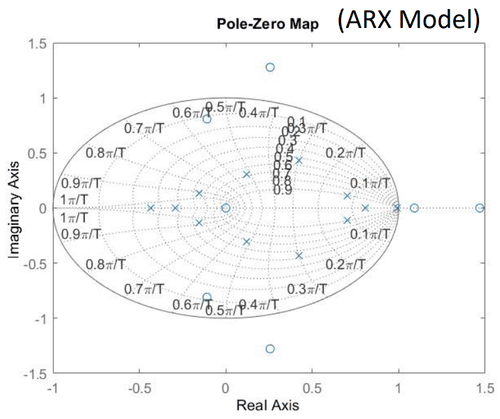
This project develops control strategies for vibration reduction in the suspension system to enhance passenger comfort. The challenge arises from disturbances originating from various sources. To achieve robust performance, we design a stabilizing controller to manage the actuators, improving both ride comfort and suspension deflections. This work focuses on an active suspension system and μ-synthesis, resulting in robust performance through our controller design.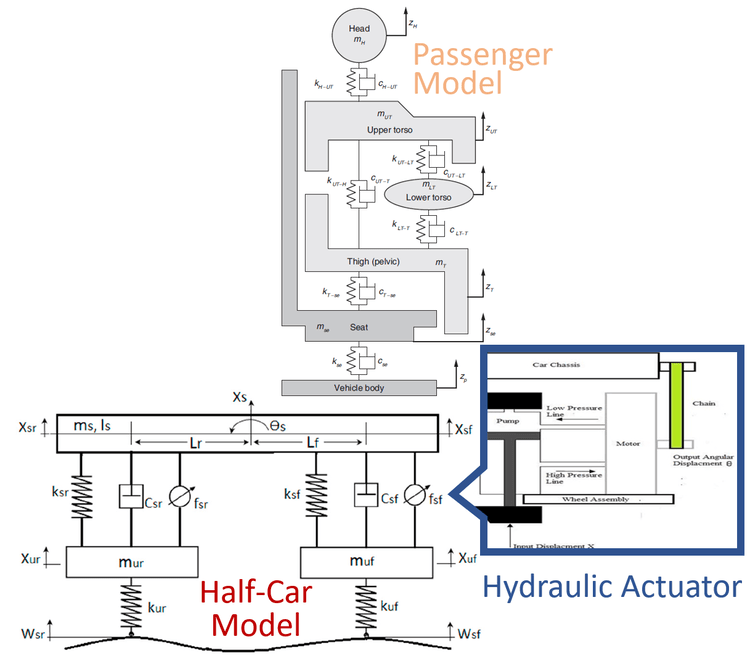
This paper presents the adaptive control design and stability analysis of robotic manipulators based on two approaches: Lyapunov stability theory and hyperstability theory. We introduce two types of control for a 2-degree-of-freedom (2-DOF) robotic manipulator: computed-torque control and adaptive control. Additionally, we apply adaptive control to end-effector motion and force control, emphasizing motion control (e.g., position control, trajectory tracking). The control system developed by integrating Proportional-Integral-Derivative (PID) control and Model Reference Adaptive Control (MRAC) demonstrates convergence through the hyperstability approach. We compare the characteristics of the systems developed using PID control, MRAC control, and hybrid (PID + MRAC) control.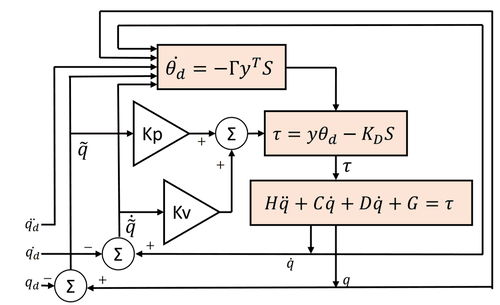
In this project, we apply several control schemes, including PID control, to the inverted pendulum. We analyze the system’s characteristics to enhance its performance, aiming to shorten the settling time and minimize the steady-state error.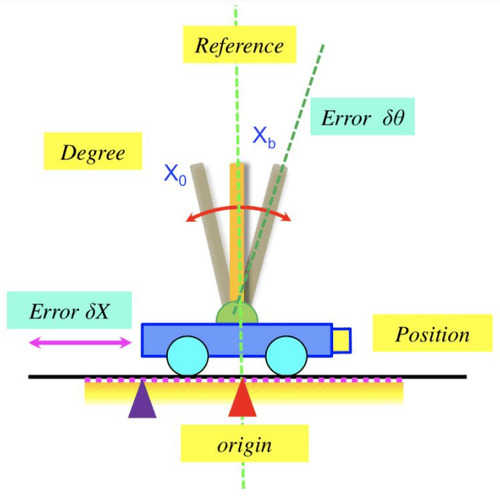
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.
In the summer of 2023, I successfully defended my thesis titled Development of 3D Reconstruction and Navigation for Mobile Robots. As the title suggests, my research integrates two key components: 3D reconstruction and autonomous mobile robots (AMRs). This work not only forms the basis of my master’s thesis, which was published at National Taiwan University, but also encompasses three distinct paper drafts, each exploring different aspects of my research.
After reading the summary of the thesis and my contributions, you can visualize my experiments through the following videos.
Autonomous Navigation on Navigation Mesh (NavMesh) for The Mobile Robot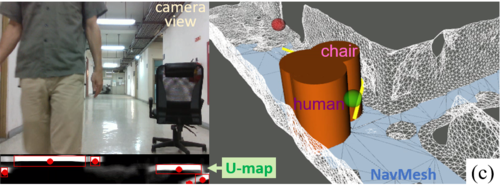
2D Pathfinding and Navigation for The Mobile Robot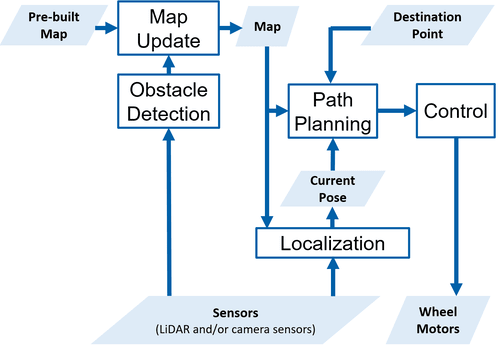
Improved Real-Time Pipeline for 3D Mesh Reconstruction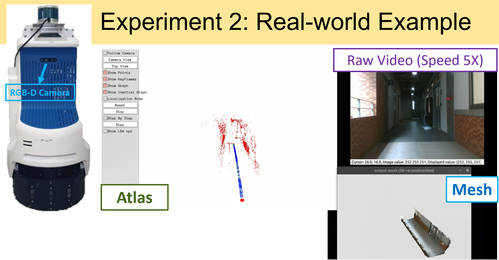
Development Tools: Google Maps, RenderDoc, Blender, MeshLab 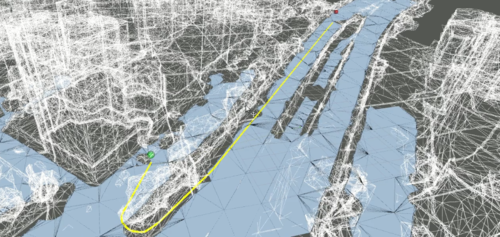
To perform ORB-SLAM3 with an RGB-D camera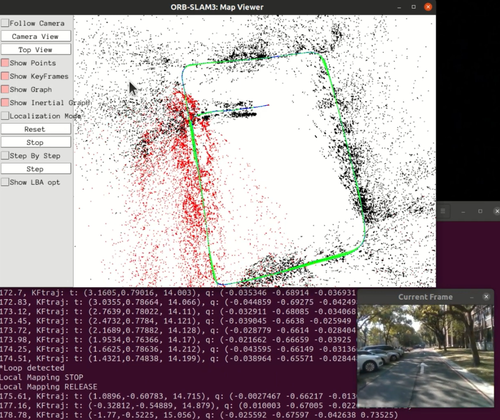
To perform SC-LeGO-LOAM on our campus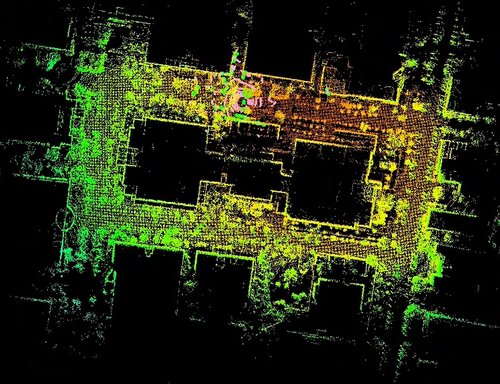
We focus on GMapping, while addressing the issue of loop-closing. 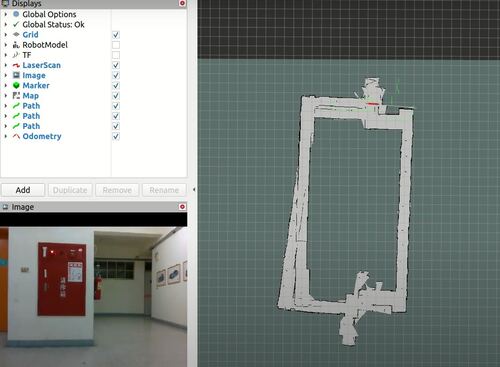
Point-cloud reconstruction from disparity in the context of stereo cameras refers to the process of creating a 3D representation of a scene using information obtained from two or more images captured by stereo cameras.. 
SAD-SLAM: Sign-Agnostic Dynamic Simultaneous Localization and Mapping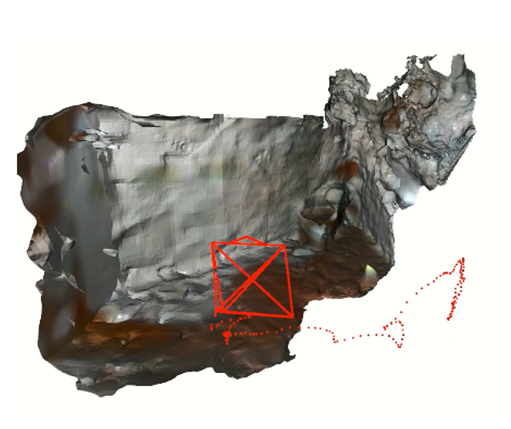
Feature descriptors chosen as SIFT ROOT demonstrate a better result of visual odometry. 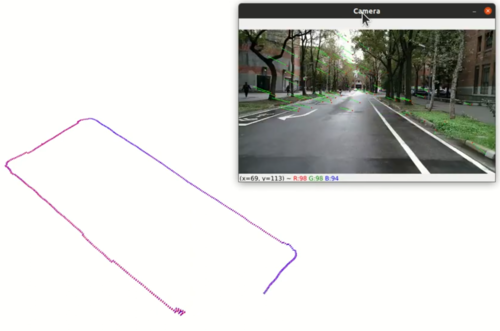
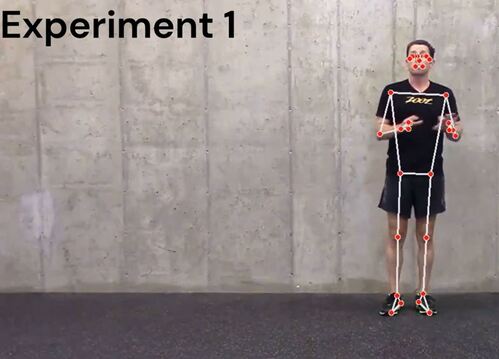
Use MediaPipe to detect pose landmarks.